Cours des engrenages
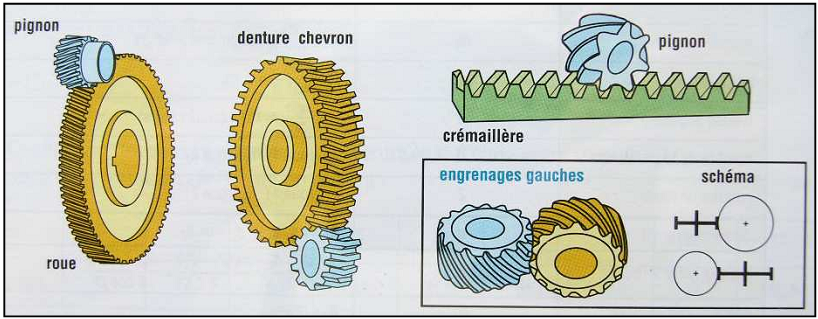
IV. Engrenages droits à denture hélicoïdale
4.1 Généralités
– Ils transmettent le mouvement entre deux arbres parallèles;
– L’angle d’inclinaison de la denture ou angle d’hélice β, est le même pour les deux roues mais en sens inverse.
4.2 Comparaison avec engrenages à denture droite
– Avantages :
• Transmission plus souple, plus progressive et moins bruyante (plus l’angle d’hélice β est élevé, plus c’est vrai).
• 2,3 ou 4 couples de dents toujours en prise; transmission d’efforts • 2,3 ou 4 couples de dents toujours en prise; transmission d’efforts importants à vitesses élevées.
• Réalisation facile d’un entraxe imposé en faisant varier l’angle d’hélice β.
– Inconvénients :
• Force axiale générée par l’angle d’hélice et rendement un peu moins bon.
• Utilisation comme engrenage mobile (baladeur) impossible; les engrenages doivent toujours rester en prise.
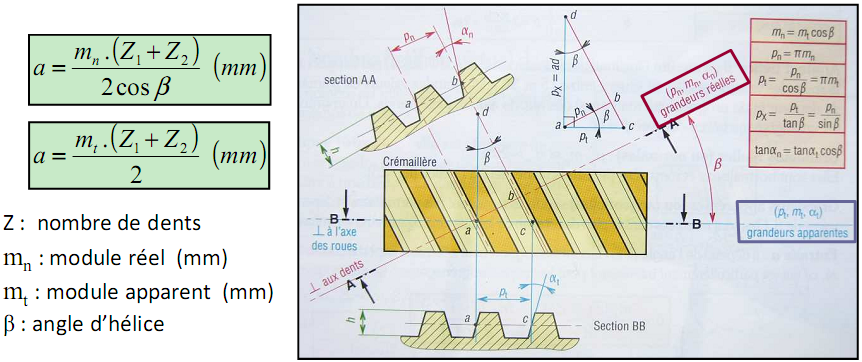
4.3 Angle d’hélice β
– L’angle d’hélice β mesure l’inclinaison de la denture par rapport à l’axe de la roue (valeurs usuelles entre 15° et 30°).
– Entraxe a :
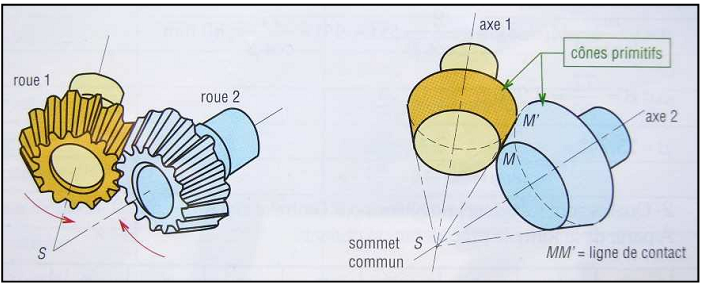
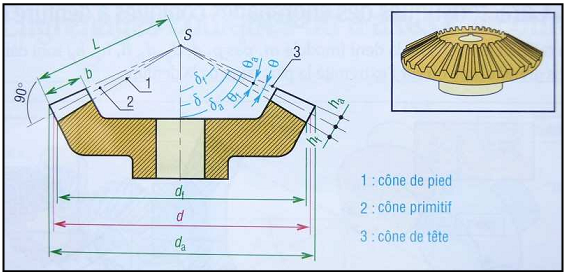
V. Engrenages coniques ou à axes concourants
5.1 Généralités
– Permet de transmettre le mouvement entre deux arbres dont les axes sont concourants.
– Les surfaces primitives ne sont plus des cylindres mais des cônes qui sont tangents sur une ligne de contact MM’ et avec un sommet commun correspondant au point S.
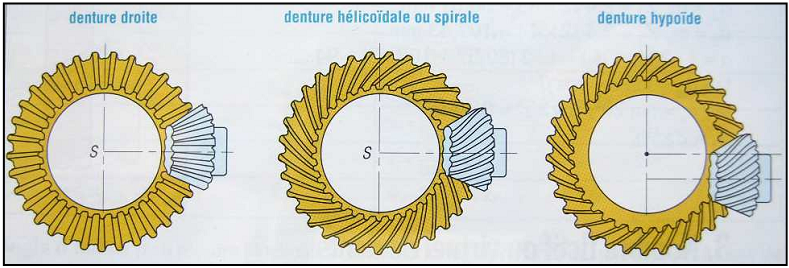
5.2 Principaux types
– À denture droite : idem aux engrenages cylindriques.
– À denture hélicoïdale ou spirale : plus progressif et moins de bruit, angle typique de 35°.
– Engrenages hypoïdes : variante complexe des précédents, axes des roues orthogonaux mais non concourants, frottement élevé.
5.3 Principaux paramètres
– Les équations vues pour les engrenages cylindriques droits s’appliquent de la même manière.
– On parle ici de cônes plutôt que de cylindres ou de cercles et quelques angles supplémentaires sont définis pour caractériser la relation entre les axes des deux roues.
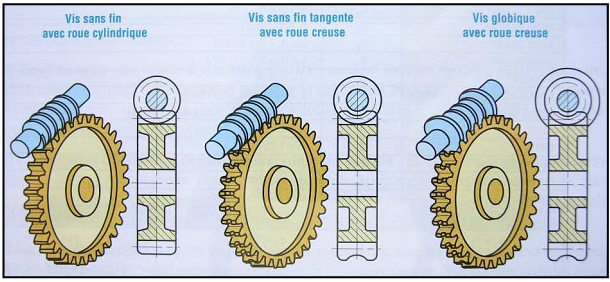
VI. Engrenages roues et vis sans fin
6.1 Généralités
– La transmission s’effectue entre deux arbres orthogonaux.
– Il permettent de grands rapports de réduction (jusqu’à 1/200) et offrent des possibilités d’irréversibilité.
– Ils donnent l’engrènement le plus doux et silencieux mais le frottement important entraîne un rendement médiocre.
6.2 Formules de base
– Différence principale au niveau du calcul de l’entraxe a.

VII. Qualité des engrenages
Classes de précision
– Classe 1 à 4 : Précision exceptionnelle et grandes vitesses (V > 30 m/s).
Engrenages étalons, turbines.
– Classe 5 et 6 : Denture rectifiée ou rasée, vitesses élevées (V < 20 m/s).
Appareil de mesure, turbine, automobiles, machine outils.
– Classe 7 : Denture taillée et rectifiée, bonne qualité en mécanique – Classe 7 : Denture taillée et rectifiée, bonne qualité en mécanique générale, vitesses (V < 10 m/s). Manutention, machines outils, automobiles, machines de bureau.
– Classe 8 et 9 : Qualité courante pour roues trempées non rectifiées, vitesses (V < 7 m/s).
– Classe 10 : Procédés usuels de fabrication, incluant engrenages en plastique.
– Classe 11 et 12 : Engrenages lents (V < 2 m/s) et/ou à gros modules.
